發布日期:2022-04-18 點擊率:70
用環流法辨別電動機繞組頭、尾端,是利用電動機轉子中的剩磁在定子三相繞組中感應電動勢的原理來實現的,如圖所示。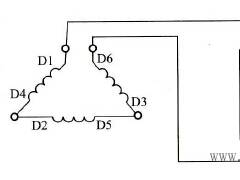
圖 環流法判斷三相電動機定子繞組頭、尾端
(1)先將三個繞組找出來后,將萬用表撥至直流10mA擋,萬用表表筆接在兩個繞組的任意兩個引出端。剩下的4個引出線可任意串聯后,將3個繞組接成三角形。
(2)用手緩慢而勻速地轉動電動機轉子,同時觀察萬用表指針擺動情況。擺動不大或不擺動,說明三角形接法是正確的.三相繞組分別為頭尾相連。
(3)如果萬用表指針有較大角度的偏轉,說明接線錯誤,將萬用表一表筆不動,另一表筆改接在本繞組的另一端,重新轉動電動機轉子,如萬用表仍有較大偏轉,可將剩下一相的兩個端子對調后重新連接好再試,萬用表指針不擺動或擺動不大時即為正確的三角形接法。
依據以上試驗結果和三角形頭尾相連的規定就可找出電動機繞組的始端和末端。此方法適用于電動機能用手轉動或無電池情況下。
下一篇: PLC、DCS、FCS三大控
上一篇: 索爾維全系列Solef?PV

型號:82344715
價格:¥1
庫存:10
訂貨號:82344715

型號:6FC8506-1RX01-0AA0
價格:面議
庫存:10
訂貨號:6FC8506-1RX01-0AA0
型號:6FC8506-0EX03-1AA2
價格:面議
庫存:10
訂貨號:6FC8506-0EX03-1AA2
型號:6FC8506-2EX00-0AA0
價格:面議
庫存:10
訂貨號:6FC8506-2EX00-0AA0
型號:6FC8506-0EX08-6AA2
價格:面議
庫存:10
訂貨號:6FC8506-0EX08-6AA2
型號:6FC8506-2RX08-0AA0
價格:面議
庫存:10
訂貨號:6FC8506-2RX08-0AA0


